シャーレ/マイクロプレート搬送ロボット
シャーレ搬送ロボット
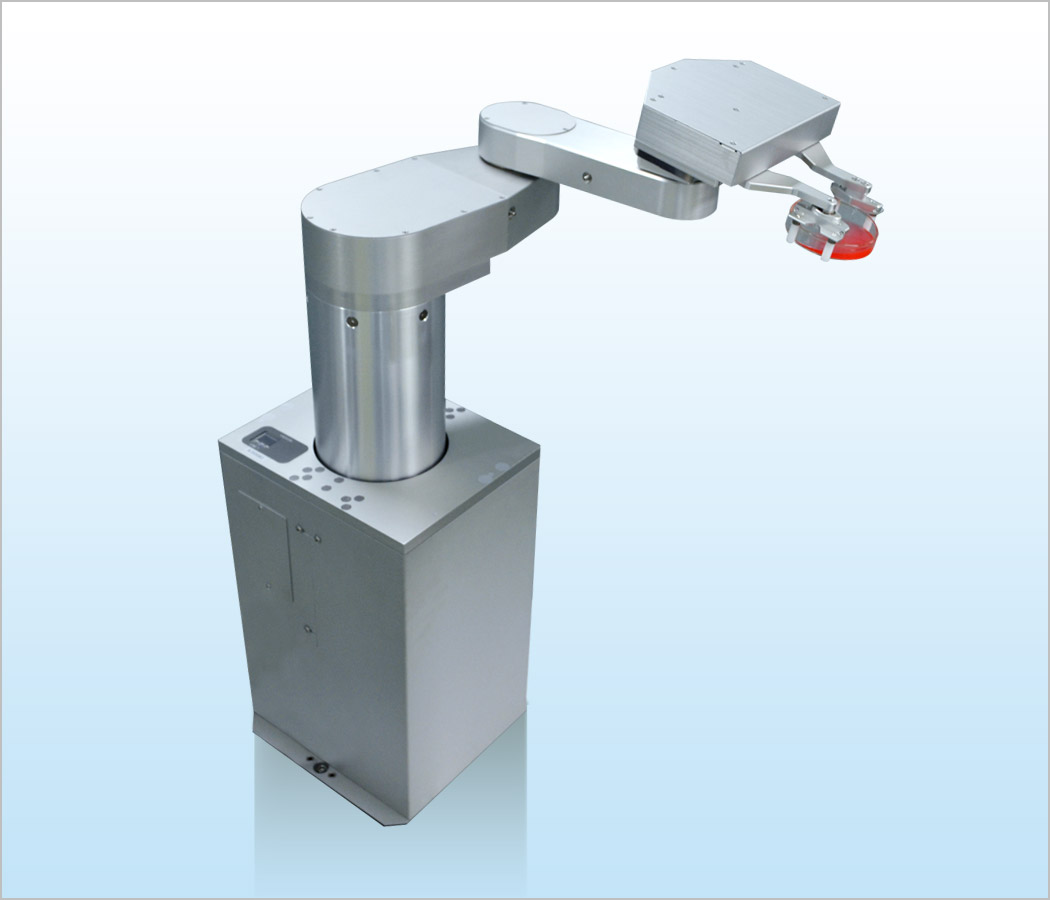
- バイオテクノロジー、医療、研究機関等の実験・検査で使用されるシャーレやマイクロプレートを、安全かつ正確に搬送するためのロボットです。
環境と仕様
製品概要
- 製品名
- シャーレ搬送ロボット
- 設置環境
- クリーンルーム内大気
- アーム
- シングルアーム
- 到達距離
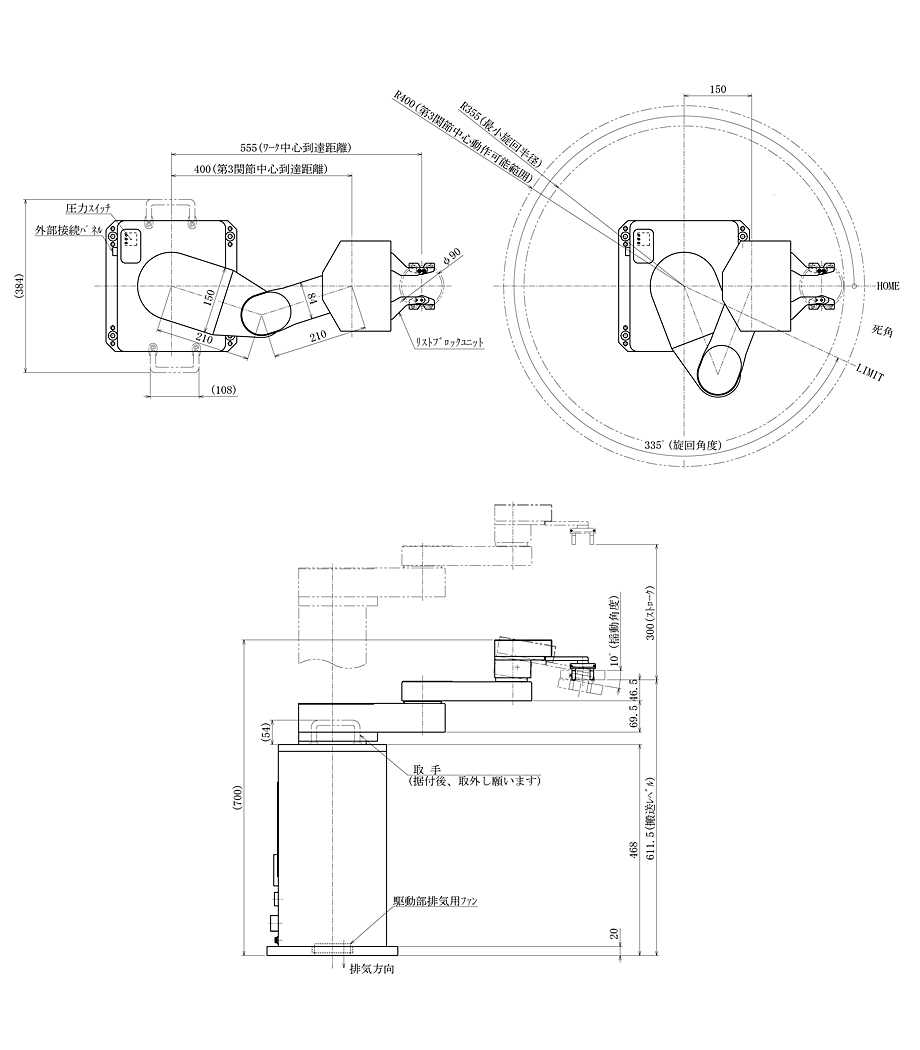
- 555 mm (ワーク中心到達距離)
- 昇降距離
- 300 mm
製品型式一覧
| 型式と昇降距離(mm) | |
|---|---|
| GCR4210-300-AM | 300 mm |
製品動画
※画像、動画はシャーレ搬送ロボット(GCR4210-300-AM)です
製品特徴
- 医療、バイオ関連施設などの無菌室、クリーン環境下での搬送が可能
- マイクロプレート搬送も可能
- チルト機構によりシャーレを傾けて、培養液などの吸引可能
- 当社各ロボットに搬送部を取り付け可能(本仕様は水平多関節型ロボットへの搭載としています)
標準仕様
| ロボット仕様 | |
|---|---|
| ロボット型式 | GCR4210-300-AM |
| 被搬送物 | シャーレφ90x21 mm(ガラス)(※その他サイズ、マイクロプレートも対応可) |
| 搬送物保持 | エアシリンダ駆動によるメカニカルグリップ方式 |
| 機械構造形式 | 水平多関節型 |
| 制御軸 | 4軸 |
| モータタイプ | 全軸ACサーボモータ |
| 動作範囲 | 第3関節中心:400 mm 旋回角度(θ軸):335度 上下ストローク(Z軸):300 mm |
| 搬送速度(平均) | アーム(R軸):165 mm/sec 旋回角度(θ軸):165度/sec 上下ストローク(Z軸):150 mm/sec |
| 繰り返し精度 | ±0.1 mm以内 |
| クリーン度 | ISOクラス2以下(ISO14644)(駆動部排気時) |
| ユーティリティ | エア:エッジグリップ駆動用(0.15MPa以上) リストブロック揺動用(0.3 MPa以上) |
| 質量 | ロボット本体 約37 kg |
| コントローラ仕様 | |
| コントローラ型式 | C5000Sシリーズ |
| インタフェース | RS232C, パラレルフォトI/O |